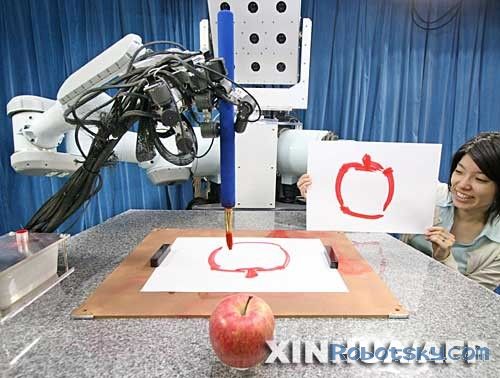
作为日本国内首屈一指的国立大学,日本东京大学的财政收入主要依靠政府资助。仅在1979至1980 年度,日本政府给东京大学的拨款就达到了 800 亿日元,以后逐年增加,每年预算总在千亿日元以上。在政府雄厚的资金支持和一流的科研学术水平下,该校在机器人开发领域建树颇丰,成功制造了一系列尖端的机器人。早在2001年,东京大学就研发出了世界上第一只动物机器人――一只剪去翅膀的机器人蟑螂,期间日本政府向此项研究计划投资了340万英镑!2003年,东京大学的研究生院情报理工科学系科研小组,就成功研制出了会自动从仰卧状态跳起的人型机器人,这种机器人在世界上是首次研制成功。而在2006年,该大学的一批研究人员Takao Someya等通过将传感器嵌入塑料薄膜,制成了机器人的电子皮肤,使机器人对压力和温度有类似人的感觉。从勤于端茶送水的家政机器人“HRP-2”,到依样画苹果的机器人(下图),都吸引了业界的广泛关注。
近日,东京大学再次成为了广大机器人爱好者和业界人士的关注焦点。该大学的工程师Tsuyoshi Horo成功开发出一款极其新颖的机器人控制(或者在此文中成为移动工具)系统,该系统通过利用一系列手势和肢体语言控制。据悉,研究人员在一个受约束的环境中利用一组环绕的摄像头,追踪和探测人的肢体运动,然后把摄像头记录下来的一系列人体运动,转变为机器人的运动。
在此过程中,摄像头的作用,是在一定的空间内形成一个实时的3D(可以测量体积)物体(或人体)模型,这些所谓的模型接着在显示器中被转化成一团虚幻的粒子图形,而粒子作为数据由相关软件读取并处理。可视的粒子动作控制,让使用者只需要用手指就能向机器人发出指令,让它们按你的命令向你指明的方向运动――这使机器人运动时方向控制变得更加得心应手,完全不逊色于那些标榜可以远程遥控的机器人控制系统。的确,这一技术值得称赞,但我们恐怕对把自己变成高度复杂的魔方(Rubik's cube)要更感兴趣。 |
日本东京大学研发出肢体控制机器人

新闻录入:贯通日本语 责任编辑:贯通日本语
相关文章
中国胃癌五年生存率只有35.1%,为何日本高达74.9%?
如本科技牵手日本企业,智能手眼技术首次“出海”
日本由利亮相中国新品消费盛典,2021携手天猫从“新”出发
英国和日本已经签署了一项机器人技术合作
日媒揽要1月26日:日本研发人工智能果实采摘机器人
“杨幂机器人”售价1万多,被日本宅男抢着买,网友:又贵又吓人
东芝将投入使用利用AI技术的物流机器人 可识别杂乱货物
JR东日本拟打造“机器人车站”预防感染 实证试验即将启动
东京都营地铁站安设智能机器人 可应对中日英三种语言
日本推出一款核酸检测机器人 80分钟内可出结果(图)
减少接触小帮手上线! 自动送餐机器人日本上市
索尼自主型娱乐机器人 aibo 获得日本国家发明奖
日本1:1还原 “高达”机器人 高18米重25吨还能做动作
日本东京:机器人实测进行中
日本首家机器人拉面店,为什么选择擎朗送餐机器人?
日本全家便利店使用机器人完成门店商品陈列工作
日本企业为减轻受灾地志愿者负担 无偿借出辅助型机器人
日本即将超智能社会5.0?
东京JR“高轮Gateway”车站开展机器人消毒实证试验
机器人干“杂活” 东京一家新冠疗养酒店正式启用
特殊时期影响 擎朗送餐机器人在日本加速落地
日本:普及AI教育与机器人革命
2020年日本机器人产业市场调研报告 第三期
日本利用AI机器人判断访客是否佩戴口罩 并提醒要戴好口罩
日本精工发布2020年第一季度财报