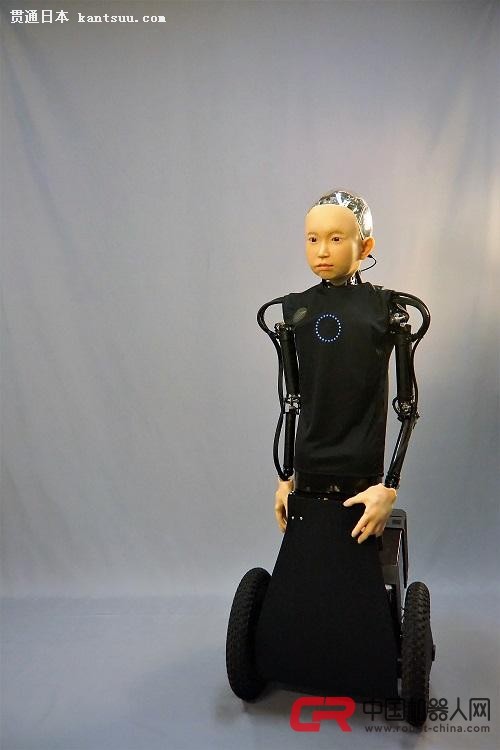
在最近的研究中,对话机器人 领域受到了相当多的关注。然而,迄今为止,这些研究都没有充分地探索机器人的“对话感”、机器人的“存在性”以及机器人的“社交性”。为了应对研究中的这一差距,大阪大学的Hiroshi Ishiguro和他的团队成员启动了ERATO ISHIGURO共生人机交互项目,他们一起研发了一个模拟人对话的人形机器人。在这个项目中,他们专注于机器人与人类互动过程中产生的亲密关系。为了加强对话机器人的积极作用,他们研发出一个名为“ibuki”的类似儿童的机器人。“ibuki”旨在通过轮子与人类一起行走(移动)。
“ibuki”是一个配备移动装置的类儿童式机器人。通过交流对话,人们会分享自己的经历,这个机器人有望成为一个能够与人类建立更深层关系的对话机器人。在可行性和安全性方面,这个机器人采用一组车轮作为其移动装置,这个装置包括一对用于水平车身运动的偏心轮和一个用于垂直车身运动的滚珠螺杆驱动执行器。这把人类重心位置复制到机器人上,即使是在轮子上移动,它也显示出了类似人类的动作。此外,除了不同的面部表情之外,它还有47个自由度使其能够表达各种情绪,做手势。 首先,这个团队研发了一个使用相机,麦克风阵列等的多模态识别系统。然后,为了建立技术基础来促进机器人与人类的交互,这个团队研发了一种对话控制系统,这个系统可以使机器人在交互过程中控制它的的语音,动作,眼神和情绪,而这是基于机器人对人类能感受到其存在性的渴望。尽管验证这个系统的实验是在短时间内进行的,但是实验包括了在等候室与访客进行对话;它已经证明了机器人“ERICA”能够进行自然对话并且能增加人类对机器人的感知存在,而这些都不太可能通过使用其他的著名机器人来实现。 第二,通过使用一些新技术,比如在交互过程中做各种形态的点头动作,分析对话句中的语言焦点术语然后进行回答,以及执行反应检测机制,这样,一个更具人类交谈感的机器人对话系统就此研发出来了。研究人员采用这个系统进行实验,实验中,人类参与者与机器人进行对话,并且在实验期间和结束后,机器人采访者会采访人类参与者。相比著名的基于智能扬声器的系统相比,这个系统能引导机器人与人类进行交谈,并且能维持很长一段时间的对话。 第三,一组名为“CommU”的对话社交机器人也用来研发一个多机器人对话控制系统。这个系统控制多个CommU的对话行为的时间,例如何时说话、点头,以及非语言交流行为。这些是在机器人轮流交互期间设置的,诸如传话,在对话期间扮演特定角色,甚至切换彼此的角色。这个团队发现通过向交互中的人类展示这种机器人之间的对话,人类会感到这个对话是真的通过语音识别的准确独立性发生的,而事实上,这是一种没有使用语音识别的对话技术。 第四,通过两个或两个以上机器人进行对话,它们会使用模糊且模棱两可的语句,这样这些语句会暗含不止一层意思,而这样,人类在人类言语意图的对话独立性中就不会感到矛盾(而这实际上是一种没有意图检测的技术)。通过使用这些技术,机器人的对话感可以体现出来,人类对机器人对话的感受效果也能提升。换句话说,这个团队发现两个或更多个机器人的协作可以建立一个社会情境,并且可以提高人类的想象力来正向地分析观察,这样,对话的不适感就会减少。 最后,为了研发出机器人所需要的“与人类共存的”对话系统技术,以及为了研究对话机器人在人类日常生活中的作用,这个团队在项目中研发出了一个像孩子一样,具有移动装置的机器人“ibuki”。它的研发不仅是为了实现机器人的运动,而且是为了促进交互技术,这项技术包含了通过与人类一起行走来诱发出人类与机器人的亲和关系。“ibuki”有望实现成为一个自动的对话机器人,它能够在人类的日常生活中发挥作用。 而研究中获得的知识和“ibuki”的研发,预计这些都将应用 于类似社交对话机器人的其他领域的研发,例如用于提供信息,生命保障和人类学习支持的目的。 |
日本团队改善对话人形机器人
新闻录入:贯通日本语 责任编辑:贯通日本语
相关文章
韩国总统表示随时准备与日本对话
日本原子弹爆炸后的幸存者,哭诉:人类不要再制造我这样的怪物了
中国胃癌五年生存率只有35.1%,为何日本高达74.9%?
如本科技牵手日本企业,智能手眼技术首次“出海”
日本由利亮相中国新品消费盛典,2021携手天猫从“新”出发
この時代の抱える4つの課題を解決
英国和日本已经签署了一项机器人技术合作
日媒揽要1月26日:日本研发人工智能果实采摘机器人
日本长崎核爆炸后的幸存者,哭诉:人类不要再制造我这样的怪物了!
“杨幂机器人”售价1万多,被日本宅男抢着买,网友:又贵又吓人
日本病毒学家北里海雄谈——新年将至,全球如何战疫情
人類貧困削減経験国際フォーラムが開幕 習近平国家主席が祝賀メッセージ
东芝将投入使用利用AI技术的物流机器人 可识别杂乱货物
JR东日本拟打造“机器人车站”预防感染 实证试验即将启动
第六轮中日企业家和前高官对话线上召开
日本调查显示疫情下2成夫妻“关系有所改善”
东京都营地铁站安设智能机器人 可应对中日英三种语言
日本推出一款核酸检测机器人 80分钟内可出结果(图)
日本将向太平洋倾倒核废水?核辐射到底多恐怖?看看这里就知道了
减少接触小帮手上线! 自动送餐机器人日本上市
索尼自主型娱乐机器人 aibo 获得日本国家发明奖
日本1:1还原 “高达”机器人 高18米重25吨还能做动作
習近平国家主席「さらに素晴らしい世界の未来を共に創造」
日本东京:机器人实测进行中
日本首家机器人拉面店,为什么选择擎朗送餐机器人?