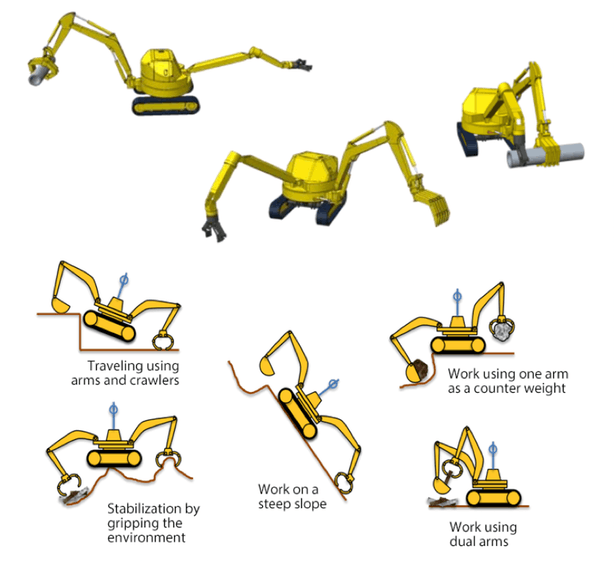
据外媒报道,日本研究人员在去年开发的救灾机器人的基础上,创建了一个远程操控的灾害搜救建筑机器人原型。 这种机器人的两臂可以围绕其中心旋转360度,并提供多任务功能。该团队还开发出有四根手指的“机器手”,帮助机器人掌握重型建筑工作。
为了解决现有的重型救灾施工设备的远程操作和移动性问题,这个机器人原型设计有两个能够围绕中心轴摆动360度的液压臂。据报道,这种设置能给予机器人“高度的稳定性”,同时也允许操作的灵活性。该团队为这种建筑机器人开发了一种双功能的四指附件,可以作为抓取碎片的抓爪,或作为铲除瓦砾的挖掘机。
与此前研发的机器人一样,力度传感器向操作员反馈触觉振动,为他们提供了触摸目标对象的感觉。另外操作员可以利用拴在机器人上方的无人机实时查看任意地方的俯视图,评估机器人周围的环境。
这个机器人原型是由大阪大学、东京大学、东北大学、东京大学、东京工业大学的科研人员共同研发。 |
日本研发出双臂灾害救援机器人


新闻录入:贯通日本语 责任编辑:贯通日本语
相关文章
日本前幼儿园职员涉嫌偷拍男童并贩卖视频被捕 涉案人数逾500人
牛丼连锁“すき家”母公司年营收破1万亿日元 创日本外食业纪录
前佐贺市议因利用高龄女性认知功能下降骗取4145万日元,被判刑6年
日经平均股价一度上涨超过800点,徘徊在38,400点以上
日本千叶外房海岸发生连续冲浪事故,2人不幸遇难
香川老旧天文台举办最后一次观测会 望远镜将移至博物馆展出
日本和牛出口额创新高
日本福岛地方社区再造计划获成效
日本青少年自杀率下降得益于心理健康项目
日本企业女性管理层比例首次突破15%
外国人劳动政策放宽以应对劳动力短缺
日本推出新育儿支援政策应对少子化
鈴木えみ、夫との寝室別スタイルを告白「いびきがすごくて一緒には絶対寝ない」
倖田來未、ロサンゼルスで大胆スリットから美脚披露
武田真治、コスプレで別人級の変身!
ジェジュン、「ビジュアルショックだが、私はイケメンだとは思わない」
IVEユジン、故郷・大田でKリーグのキックオフセレモニーに挑戦
NewJeansダニエル、ファンへの感謝と不屈の決意を綴る長文メッセージ
(G)I-DLE、グループ名を「i-dle」に変更し新たなスタート
日テレ郡司恭子アナ、『ミヤネ屋』で結婚を生報告
本仮屋ユイカ、「名前で負けた」と感じた芸能人を告白
島袋寛子、透明感あふれる最新ショットが話題「白に白を重ねたような白」
川瀬もえ、愛車シビック公開で話題沸騰「渋い」「カッコよすぎ」
国民民主党、参院選候補者選定で「身体検査不足」への懸念が浮上
工藤静香、長女24歳誕生日に色鮮やかなワンプレート料理を披露