科学进步给我们最好回馈就是提高我们的生活品质和减少某些疾病带来的痛苦,世界上总有那么一些人一生投入与科学巨人的博弈中,并一次次取得突破。十五年心血研究走路,终于取得实质性突破,全面,系统化的掌握了人类步行的内在机理。科学研究成果如果不用于真实生活中的应用那也只是一些虚无缥缈的文字,此次突破不仅仅是停留在理论研究层面是,更重要的是开发出全球第一款无动力源步行辅助器-爱来奇无动力步行辅助器,开启康复新时代。 什么是爱来奇无动力步行辅助器? 爱来奇是一款基于PDW(被动动态行走)理论研制的用于步行康复和协助步行的穿戴式设备,它是全球第一款不需要动力源就能主动辅助走路的设备。爱来奇无动力步行辅助器结构简单可靠,超轻量化设计整体重量只有550克,穿戴在身上完全不会有额外的负担感(世界目前最轻的主动式步行器)。
爱来奇的由来 爱来奇适用于神经系统疾病如中风,脊髓损伤,高龄或多发性硬化症而行走困难的个人,主要特征如下: 1。 单腿或双腿虚弱 2。 步行时,摆动腿部时有困难 3。 上楼梯抬腿困难 4。 步态不自然,步行时不稳定
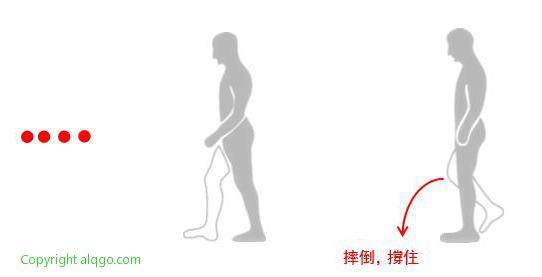
什么是PDW理论? 被动动态行走理论是受到哈佛大学学者Mochon和Mcmahon所提出的“弹道步行”模型的启发,由加拿大学者McGeer于20世纪90年代所提出 。被动动态行走是研究双足(两条腿) 步行系统的一种方法,这个系统包括人类或其他双足动物,或你想制作或控制的双足步行机器人。与其把它作为一个持续不断的努力保持平衡,不如把双足行走看做一个在足部接触变化的间歇干扰下的持续的被动跌倒,我们可以对它由一个更好的理解。 简单来说就是人走路不仅仅是完全靠自身肌肉力量,更需要自然重力的迫使。走路可以简化成一连串的稳定被动摔跤。
McGeer设训了一类简单的双足无动力行走机器人,其行走是在小倾角斜面上由上而下靠自身重力驱动实现的。T.McGeer对其被动机器人模型行走动态和稳定性进行了研究,由此开启了双足行走机器人研究的有一领域――久驱动机器人。 日本学者运用被动步行原理制作的无动力步行机器人更是在2009年创下了连续行走13小时45分钟(15.2km)的世界记录
09年创世界纪录 (2012年打破原先纪录,创下连续步行27小时72公里的世界纪录) 。无动力双足机器人动力特性的研究有助于揭示人类双足行走的内存机理,解释人类行走稳定性、鲁棒性、高效率的原因。 爱来奇无动力步行辅助器的使用方式 第一次使用时需要按自己个人参数选好碳纤维杆后组装好,然后将组装好的爱来奇穿戴在患腿一侧或双腿上即可。第一次组装好后,以后整个穿戴过程在几十秒能就能完成,非常的方便和简单。爱来奇辅助分两个过程: 1。 未穿戴一侧腿迈步向前时,辅助器的储能装置将人的动能和重力势能蓄积起来 2。 当穿戴一侧腿迈步时,辅助器释放出之前储存的能量,帮助腿自然的的迈出。 |
日本科学家开发首款不需要动力步行器
![FQIV}YCU74MO0M3AT][07EE.png](http://news.kantsuu.com/UploadFiles/201801/20180117204029462.png)


新闻录入:贯通日本语 责任编辑:贯通日本语
相关文章
日本大学学者: 服贸将成拉动中国经济增长的“新动力”
日本体检:改变走路方式即可抗衰老?
LNG动力火箭推动日本私人太空产业发展
“K-CAR”在日本那么火,为什么不引入中国?
日本服役全球首艘锂电潜艇 中国专家指出其不足
日本为什么发展氢能:别无选择
2030财年燃效提升三成 日本欲以法规促汽车电动化
日本央行行长黑田东彦表示:日本央行将适当引导政策关注海外经济变化对日本的影响 为实
日本IHI集团推进结构重组整合旗下动力系统企业
瑞穗银行:日本经济实际上缺乏动力
专家:房价上涨才是拉动消费最大的动力,这句话应该对日本人说
日本双日出售其印尼动力煤矿30%股份
日本双日出售其印尼动力煤矿30%股份
日本首次启用混合动力货船 降低污染排放
日本东京机场引入可穿戴动力装置 可以助员工一臂之力
智能物流出海日本 京东助乐天启动无人配送
无人送货车上路测试在日本获批
日本经济重返上升轨道资本支出成最大动力
DHL将停止对运往日本需检疫货物特殊处理
阿里云日本第二可用区开放服务
日本百货店免税销售额同比增长26%创新高
日本锂电池之父技术加持 恒大收购卡耐新能源拥“战略武器”
Uber在日本推出手机打的服务
日本要抱团发力动力电池?日立12.8亿元出售车载电池业务
京东携手日本三菱化工 建水培“植物工厂”