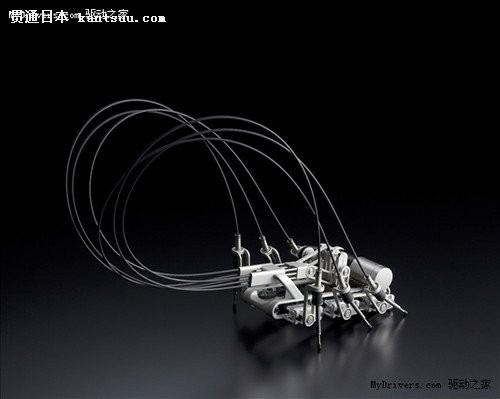
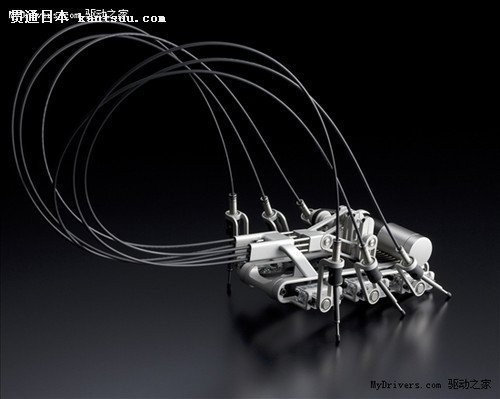
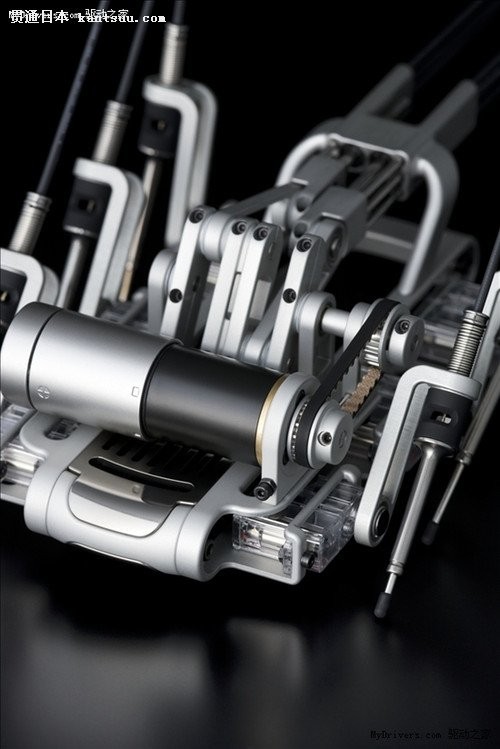
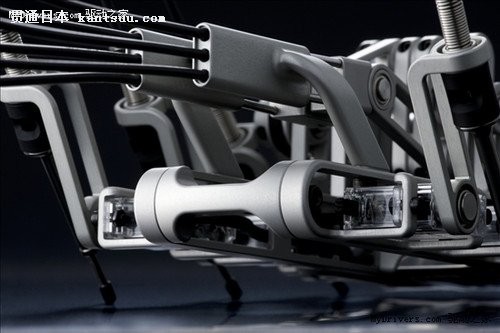
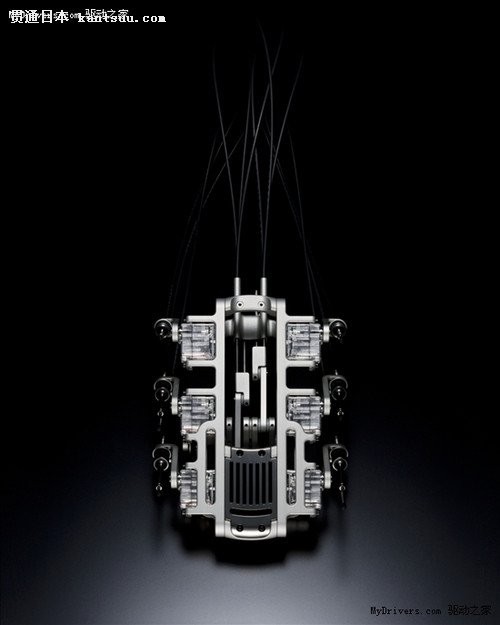
仿生设计一直是机器人研究领域中一项重要学科,比如这款名为Phasma的机器人就是利用了昆虫的行走方式,将其力学原理借鉴到其设计中。 Takram是一家专业的工程设计开发公司,其研发的Phasma基于斯坦福大学开发的iSprawl机器人进行了多方面的改进和优化。 Phasma共有六只机械足,每边都有三个,由发动机进行动力供给。这款机器人的行走原理最简单的描述就是,无路什么时间都会有三条腿在作支持,这样可以在快速移动中保证其处于一个稳定的状态,这是其仿生学原理最核心的部分。 目前这款机器人正在日本东京科学博物馆“仿生学机器人展”中进行展示,将持续至8月22日。 大家可以看一下其移动行走的视频展示,实在太像一只小强了。
|
日本研发蟑螂机器人





新闻录入:刘磊 责任编辑:刘磊
相关文章
中国胃癌五年生存率只有35.1%,为何日本高达74.9%?
如本科技牵手日本企业,智能手眼技术首次“出海”
日本由利亮相中国新品消费盛典,2021携手天猫从“新”出发
英国和日本已经签署了一项机器人技术合作
日媒揽要1月26日:日本研发人工智能果实采摘机器人
“杨幂机器人”售价1万多,被日本宅男抢着买,网友:又贵又吓人
东芝将投入使用利用AI技术的物流机器人 可识别杂乱货物
JR东日本拟打造“机器人车站”预防感染 实证试验即将启动
东京都营地铁站安设智能机器人 可应对中日英三种语言
日本推出一款核酸检测机器人 80分钟内可出结果(图)
减少接触小帮手上线! 自动送餐机器人日本上市
索尼自主型娱乐机器人 aibo 获得日本国家发明奖
日本1:1还原 “高达”机器人 高18米重25吨还能做动作
日本东京:机器人实测进行中
日本首家机器人拉面店,为什么选择擎朗送餐机器人?
日本全家便利店使用机器人完成门店商品陈列工作
日本企业为减轻受灾地志愿者负担 无偿借出辅助型机器人
日本即将超智能社会5.0?
东京JR“高轮Gateway”车站开展机器人消毒实证试验
机器人干“杂活” 东京一家新冠疗养酒店正式启用
特殊时期影响 擎朗送餐机器人在日本加速落地
日本:普及AI教育与机器人革命
2020年日本机器人产业市场调研报告 第三期
日本利用AI机器人判断访客是否佩戴口罩 并提醒要戴好口罩
日本精工发布2020年第一季度财报